NETISや建設ICTを活用した技術提案で総合評価対策に
作業船位置決めシステム(航路管理タイプ)
GPSで作業船をリアルタイムコントロール

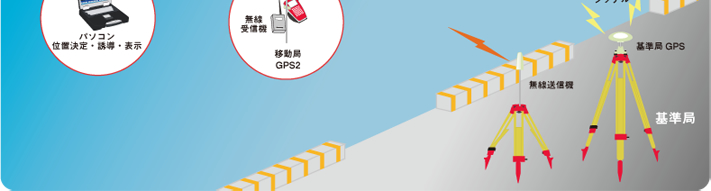


港湾、海岸などの工事において、地盤改良作業を行うサンドコンパクション、サンドドレーン、CDM(Cement Deep Mixing:深層混合)などの作業船の作業位置への誘導を行うシステムです。
RTK-GPSを2台使用していて、位置だけでなく捻りもリアルタイムで修正することができるため、パソコンの画面を確認しながら操船することで、容易に指定位置へ本船を誘導することが可能です。
トータルステーションなどによる従来型の誘導に比べ、視通を確保する必要がなく、また、天候に左右されないなどGPSの利点を生かすことができます。



画像をクリックすると拡大表示、NEXTで続けてご覧いただけます。
特長
- リアルタイムキネマティック(RTK)GPSの精度が1センチメートル程度なので、船体の位置や捻りなどをセンチメートル単位で誘導できます。
- 位置決め時のズレ量は解析用パソコンの内部に記録され、成果として印刷できます。
- GPSを使用しているため、天候や時間帯などの制約を受けません。
- 陸点には人員を配置しないで済みます。
- 座標:工事に使用する座標は公共座標・ローカル座標のいずれでも可能で、誘導画面表示にも反映されます。
- 座標系:日本国内1~19の座標系(新旧測地系対応)とそれに付随するローカル座標が使用できます。
- 測地系:旧測地系(東京データム、日本測地系)と新測地系(JGD2000、世界測地系)の使い分けが可能です。
- GPSの自動セットアップ機能を持っているので、GPSに詳しくなくても簡単に設定ができます。
- その他、工区への進入方向、杭配置(三角~四角)、杭番号、個別杭の座標確認、固定局座標の補正、などの実用的な機能が満載です。
- CADデータ(DXF形式 R.14以前)を読み込むことができるので、視覚的な誘導が可能です。
- 画面に実座標で線や点を描けるので、障害物等の入力もできます。

用途
- あらかじめ危険区域(航路・桟橋)を指定おくことでそこへ入らないように監視をすることができます。
ソフトウェア
船体も実寸で表示されるので、障害物との距離等も把握できます。
座標設定
旧測地系(東京データム、日本測地系)と新測地系(JGD2000、世界測地系)の使い分けが可能です(相互変換機能はありません) 。日本国内1~19の座標系(新旧測地系対応)はプリセットされていて、ソフトウェア内部で北緯東経←→公共座標←→ローカル座標の相互変換を行います。誘導は公共座標・ローカル座標のいずれでも可能で、誘導画面表示にも反映されます(ローカル座標を使用する場合にはあらかじめ変換パラメータを入力しておいてください)。
使用するGPSの選択
NMEAフォーマットの出力ができるものであればメーカーは問いません。
使用するGPS受信機をリストから選択しますが、その中に無い場合はその他(NMEA GGK/GGA)を選択するとNMEAデータの受信ができるので対応できます。
なお、リストにあるGPS受信機をご使用の場合は自動セットアップを行うことができます。GPSのターミナルなどで設定する必要はありません。
工事設定
工区、杭番号、その他設定が簡単にできます。
工区は長方形の四隅座標を入力することで設定しますが、公共座標・ローカル座標のいずれでも可能です。1(A)工区は公共座標、2(B)工区はローカル座標、というような使い分けも可能です。
杭番号はひらがな、かたかな、アルファベット、数字で、逆順も可能です。
杭配置(三角、四角)、杭間隔(X、Y別)、工区への進入方向、その他設定が可能です。
本体定数はあらかじめ計測して入力しておきますが、キャリブレーション機能で現場ごとに合わせることができます。
全体図
・背景図でセットした画像が表示されます。
・各杭が個別に表示され、施工済みと施工前あるいは施工曜日別の色分けができます。
・入力にある他の工区も同時表示可能(選択式)なので、他の船の作業の邪魔をしないように作業できます。
その他
簡易の潮位表示、ターゲット杭の設計座標とケーシングの現在座標、GPSの状況、背景色変更、各種座標計算(ローカル変換パラメーターの計算、座標変換、他)、などの実用的な機能も満載です。

- 機器一覧
- NETIS登録商品
- 建設ICT
- GNSS測量
- スマートコンストラクションローバー
- スマートコンストラクションレトロフィットキット
- 1周波RTKGNSS受信機 RTF300スターターキット
- エアロボマーカー
- GPSを用いた地滑り観測システム
- 工事用車両運行管理システム VasMap
- ディファレンシャルGNSS受信機 SPS356
- 深浅測量ラジコンボート RC-S3
- ディファレンシャルGNSS受信機 SPS351
- 3Dゾーン監視システム rexse Zone
- GLONASS対応GNSS受信機 LEGACY-E+
- ハンディGPSナビゲータ OREGON650TCJ2
- GNSS受信機 HiPer SR
- 陸上用杭打ち誘導システム
- 3周波GNSS受信機 ライカ GS10
- GNSS(GPS)測量システム Mobile-GPMate(M3 SKY)
- 水中音響測位システム
- GLONASS対応GPS受信機 GB-3+GGD
- 監督さん.V+GNSS(FC-250)
- GPS測量システム PocketGPMate(M3 SKY)
- GPS深浅測量システム
- 作業船位置決めシステム(標準タイプ)
- 作業船位置決めシステム(航路管理タイプ)
- 3周波GNSS受信機 ライカ GPS1200+
- ライカ・ジオ・オフィス LGO
- VRS(ネットワーク型RTK-GPSサービス)システム
- 作業環境計測
- 変位計測
- 気象計測
- 安全管理
- 防犯
- その他


夏の提案に欠かせないシステムをご紹介!
橋梁・トンネル・道路付属物のインフラ点検特集
ドローンのすべてがわかるサイトCOMP-REX
技術提案のお探しならこちら- TOPICS商品

斜面崩壊警報システムのご紹介


測定器レンタルのご用命はこちら

- rexse HOME
- 機器一覧
- GNSS測量
- 作業船位置決めシステム(航路管理タイプ)
![]()
